פלטפורמת הפעלה אווירית של זרוע ארכובה חשמלית GTBZ14JD





I. סקירות ותכונות של מוצרים
פלטפורמות עבודה אוויריות של ארכובה חשמליים מפותחות על ידי XCMG, מבנים קומפקטיים וגוף רכב ברוחב 1.75 מ'.מערכת בקרה חכמה ומושלמת כוללת את הפריסה האנושנית, העיצוב נטול התחזוקה ושימוש ותחזוקה קלים, המספקת אפשרויות מרובות ובטיחות מקיפה.
[יתרונות ותכונות]
שילוב בום בצורת Σ ועיצוב אפס סחף הופכים אותו ליותר פרודוקטיבי.
● רדיוס סיבוב קטן עד 3.15 מ' מאפשר למכונה לעבוד בשטח צר.
● סוללה בעלת קיבולת גדולה של 48V ו-420Ah מאריכה את יכולת השיוט.
● טכנולוגיות ריצת מנוע AC מתקדמות;טכנולוגיות בקרת דיפרנציאל היגוי;פעולות חזקות ויציבות;יכולת דירוג של עד 30%
● טכנולוגיות משאבת DC ובקרה פרופורציונלית חוסכות אנרגיה ויעילות, מה שהופך את העבודה ליציבה ובטוחה יותר.
● ידידותית לסביבה, אפס פליטה, רעש נמוך, נסיעה ללא עקבות, מתאים לבנייה פנימית.
II.מבוא לחלקים עיקריים
1. חלק שלדה
תצורות עיקריות;2WD, הגה דו גלגלי, צמיגים מוצקים.
(1) מהירות נסיעה מרבית של 5.2 קמ"ש.
(2) יכולת ציון מקסימלית של 30%.
(3) מפחית הנסיעה המובנה המשלב את המנוע והמפחית מיושם ושתי מהירויות נסיעה (מהירות גבוהה ומהירות נמוכה) מסופקות כדי לענות על דרישות הנהיגה של המכונה בסביבות שונות.מנגנון הנסיעה כולל פונקציית בלימה עצמית בזמן נסיעה במדרונות ומצויד בהתקן מצמד כדי להקל על הגרירה במקרה של תקלה.
(4) מנגנון מחליק ארכובה לפנייה למימוש רדיוס סיבוב קטן יותר;
2. חלק בום
(1) זרוע מתקפלת + זרוע טלסקופית + ארכובה
(2) חומר בום - הבום מרותך מפלדה בעלת חוזק גבוה למימוש קל משקל ובטיחות גבוהה.
(3) זרוע מתקפלת מורכבת משתי קבוצות של מבנים מקבילים, עם קישור ביניהם, ויכולה לנוע בו-זמנית בעזרת גליל הנפה, מה שהופך את העבודה ליעילה יותר.
(4) שני חלקים של זרועות טלסקופיות מסוג צילינדר בודד;זרועות הארכובה הן מקביליות
3. חלק פטיפון
(1) סיבוב בלתי רציף של 355° ושני חורי הרכבה להעברת פיני נעילה;
(2) הפטיפון מורכב מצלחת אחת עם צלע חיזוק;נקודות הצירים מונחות מאוד ומשקל נגד ממוקם בחלק האחורי של הפטיפון;
4. חלק פלטפורמה
(1) במת עבודה גדולה בגודל 1.4 מ'×0.7 מ'.
(2) פלטפורמה מסתובבת ב-160 מעלות.
(3) כושר נשיאה של עד 227 ק"ג.
(4) מערכת פילוס אוטומטית פרופורציונלית אלקטרו הידראולית.
5. מערכת הידראולית
(1) חלקים הידראוליים - החלקים העיקריים, כולל משאבה הידראולית ושסתום ראשי, מאמצים מוצרי מותג בינלאומיים בעלי שם.
(2) מערכת הידראולית מונעת באמצעות משאבת סוללה;משאבת הילוכים מונעת ישירות עם מנוע.
(3) המערכת ההידראולית של מבנה על היא של מערכת משאבת גלגלי שיניים בזרימה קבועה: בהתבסס על טכנולוגיות בקרה פרופורציונלית חשמלית-הידראולית, המכונה יכולה לבצע את תנופת המבנה, הנפת בום, משיכה/הרחבה של בום, הנפת עבודה פּלַטפוֹרמָה;השסתום הראשי של מבנה העל הוא שסתום פרופורציונלי חשמלי-הידראולי.
(4) יחידת כוח חירום מותקנת - היא יכולה להבטיח שניתן להחזיר את הבום למצב נהיגה במקרה של תקלה במנוע או במשאבת השמן.
6. מערכת חשמל
(1) טכנולוגיית בקרת PLC - בקר אחד מסופק כל אחד לפטיפון ולפלטפורמה.קופסת בקרה מותקנת לפטיפון השלדה ולפלטפורמה בהתאמה כדי לשלוט על השלדה, הפטיפון, הבום והפלטפורמה.
(2) פריטי בקרה עיקריים - היגוי ובקרת נסיעה שלדה;הטלת פטיפון;בום טלסקופי;בקרת עייפות;תנופת הפלטפורמה
(3) שיטות הגנה בטיחותיות מרובות - ניטור כונן מנוע;הגנה על עומס יתר של המנוע;אזהרת הטיית רכב;אזהרת עומס יתר;ריצה במהירות גבוהה מוגבלת;ירידת חירום;
III.תצורה של חלקים עיקריים של GTBZ14JD
| S/N | שֵׁם | כַּמוּת | הערה |
| סוֹלְלָה | 8 | טרויאני | |
| מַטעֵן | 1 | דונגגוואן לונגשנג | |
| הנעה מנוע | 2 | CURTIS | |
| מפחית נסיעות | 2 | אומני | |
| פועל מנוע AC | 2 | KDS | |
| משאבת סוללה ראשית | 1 | BUCHER | |
| משאבת סוללות עזר | 1 | BUCHER | |
| משאבה ראשית | 1 | סנט | |
| גליל נדנדה | 1 | ארה"ב HELAC | |
| צילינדר פילוס | 2 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| גליל הנפה של זרוע מס' 1 | 2 | ||
| גליל הנפה של זרוע מס' 2 | 1 | ||
| צילינדר זרוע ארכובה | 1 | ||
| צילינדר טלסקופי | 1 | ||
| צילינדר הגה | 1 | ||
| שסתום איזון | 5 | סנט/EATON | |
| בקר | 2 | הירשמן | |
| חיישן נטייה כפולה | 1 | פרקר | |
| לְהַצִיג | 1 | Xuzhou Hirschmann Electronic Co., Ltd. | |
| מַקֵל נוֹעַם | 2 | דנפוס | |
| מתג רגל | 1 | שמשות | |
| הטיה ונסיעה | 1 | הואפאנג | |
| מנוע נדנדה | 1 | לבן | |
| צמיגים | 4 | לאיז'ו ישימאי |
IV.טבלת הפרמטרים הטכניים העיקריים של GTBZ14JD
| פריט | פָּרָמֶטֶר |
| פרמטרים של מצב ריצה | |
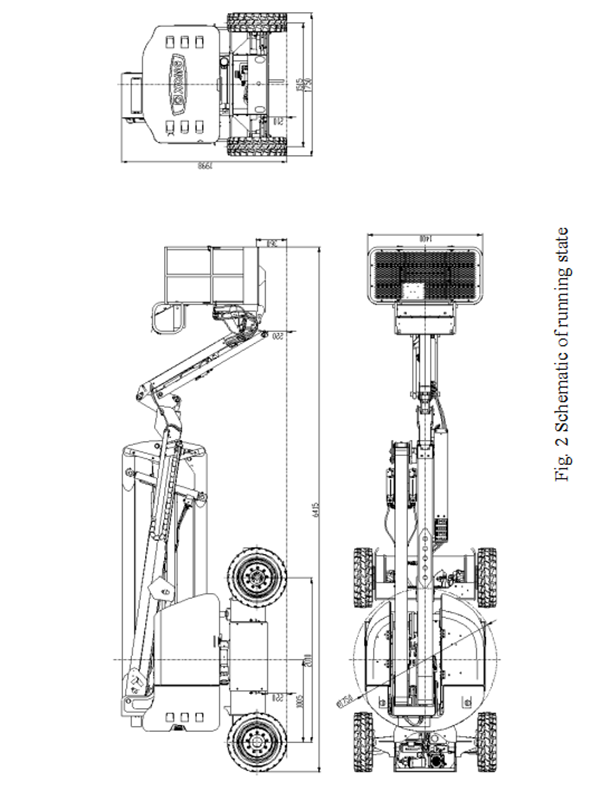
| מידות כוללות (L × W × H) | 6.42×1.75×2 מ' |
| פלטפורמת עבודה מידות כוללות | 1.4×0.7×1.15 מ' |
| מהירות מירבית | 5.2 קמ"ש |
| יכולת ציון מקסימלית | ≥30 % |
| מינימוםרדיוס סיבוב חיצוני | ≤3.15 מ' |
| מרווח קרקע/מ' (מרכז) | 0.21 מ' |
| בסיס גלגלים | 2 מ' |
| מסה כוללת | 6500 ק"ג |
| תפעול ראשי פרמטרים של ביצועים | |
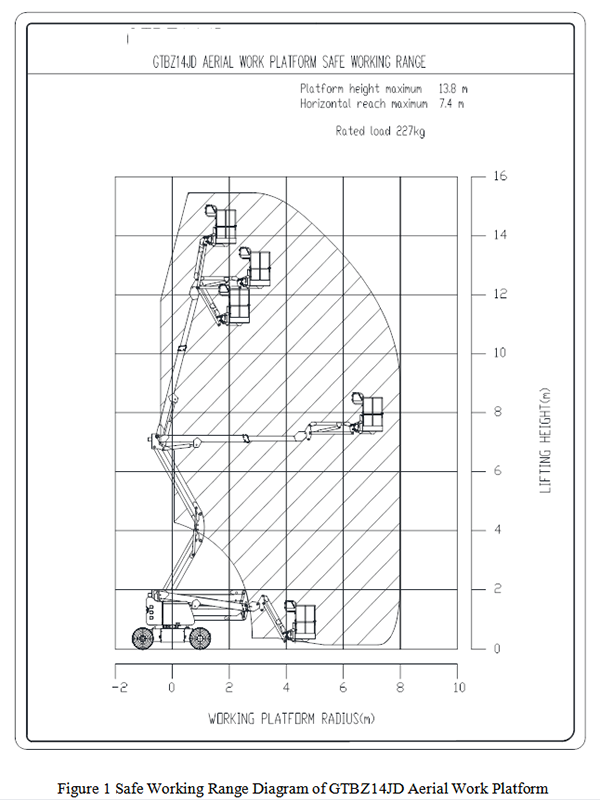
| גובה עבודה מדורג | 15.5 מ' |
| גובה פלטפורמה מקסימלית | 13.8 מ' |
| מקסימוםטווח עבודה | 8 מ' |
| גובה רשת מקסימלי | 7.03 מ' |
| היקף הנפה של זרוע מס' 1 | 0°~60° |
| היקף הנפה של זרוע מס' 2 | -8°~75° |
| היקף הנפת זרוע הארכובה | -60°~80° |
| היקף נדנדת הפלטפורמה | 180° |
| זווית הטיה | 355° |
| רדיוס הטיה של פטיפון | 0.875 מ' |
| טעינה מקסימלית | 227 ק"ג |
| הטיה מרבית לאחור | 0 מ' |
| מערכת בקרה | שליטה פרופורציונלית 12V DC |
| צמיג | צמיג 250-15 מוצק, אופציונלי 240/55 D17.5 |
| פרמטרי כוח | |
| מקור כוח | 420 Ah/48 V DC |
| יחידת כוח | 4 קילוואט/48 וולט DC |
| יחידת כוח עזר | 2.2 קילוואט/24 וולט DC |
| מנוע פועל | 3.3 קילוואט/32 וולט AC |
V. תרשים טווח עבודה בטוח של המכונה
קובץ מצורף: תצורות אופציונליות
6.1 צמיג מוצק ידידותי לסביבה (ללא עקבות)
6.2 אספקת חשמל של פלטפורמה
הגנרטור ההידראולי או ספק הכוח החיצוני מחוברים לפלטפורמה זו לשימוש.
מפרט חוט חשמל: 4×4 מ"מ
זרם נקוב: 35A
6.3 צינור אוויר של פלטפורמה
אספקת האוויר החיצונית מועברת לפלטפורמה זו לשימוש.
קוטר צינור אוויר: 8 מ"מ
6.4 תושבת נגד פגיעה של הפלטפורמה
ההתקן המתקפל נגד פגיעות אמור להגן על המפעיל מפני פגיעה בפריט הנ"ל במהלך עליית הפלטפורמה, ויכול להיות גם מתקפל, לא תופס את שטח העבודה.