
פלטפורמת הפעלה אווירית מספריים GTJZ0808





I. סקירות ותכונות של מוצרים
פלטפורמת עבודה אווירית חדשה שפותחה על ידי XCMG עם גובה העבודה של 10 מ', רוחב הרכב 0.81 מ', העומס המדורג 230 ק"ג, מקסימום.אורך הפלטפורמה ב-3.2 מטר ומקסימום.יכולת דירוג של 25%.רכב זה כולל מבנה קומפקטי, ביצועים מתקדמים, התקני בטיחות מושלמים, המתאימים במיוחד לבנייה.בנוסף.הוא נקי מכל זיהום, עם הרמה/הורדה קבועה, שליטה ותחזוקה קלה.לכן, סוג זה של פלטפורמות מיושם באופן נרחב במחסנים, מפעלים, שדות תעופה ותחנות רכבת, במיוחד אתרי העבודה הצרים.
XCMG GTJZ0808 מבנה קומפקטי יכול להיות מיושם בצורה גמישה בחלל צר; עם מערכת ההנעה החשמלית החדשה, הנהיגה חלקה יותר, ללא פליטות ידידותית יותר לסביבה;מערכת הגנה אוטומטית מובילה בתעשייה, בטוחה ואמינה;סביבת עבודה פלטפורמה ניתנת להרחבה יותר.ניתן להשתמש בגזירה בסדרת משאיות בנייה ותחזוקה של מבנים מסחריים, מחסנים, שדות תעופה ואזורים אחרים.
II.מבוא לחלקים עיקריים
1. שלדה
תצורות עיקריות: היגוי דו-גלגלי, הנעה 4×2, מערכת בלמים אוטומטית, מערכת הגנה אוטומטית לבורות, צמיגי גומי מוצקים חסרי עקבות, ושחרור ידני של הבלם
(1) מהירות נסיעה מרבית של 3.5 קמ"ש.
(2) יכולת ציון מקסימלית של 25%.
(3) זנב השלדה מצויד בחור סטנדרטי להובלת מזלג.
(3) מערכת הגנת בורות אוטומטית - להבטיח בטיחות להרמת פלטפורמה
(4) צמיגי גומי מוצקים חסרי עקבות - עומס גבוה, ריצה יציבה וידידותית לסביבה
(5) נהיגה 4×2;גלגלי הסיבוב הם גם גלגלים מניעים;שלושה הילוכים במהירות נהיגה;הליכה בכל נסיעות מותרת;
(6) מערכת בלימה אוטומטית - המכונה בולמת כאשר היא מפסיקה לנסוע או נעצרת במדרון;חוץ מזה, בלם יד נוסף לשעת חירום;
2. בום
(1) צילינדר בודד + ארבעה סטים של בום מסוג מספריים
(2) פלדה בעלת חוזק גבוה - בום קל משקל ובטוח יותר;
(3) חוזק תואם וקשיח - ודא שהבום אמין.
(4) מסגרת בדיקה - שומרת על בטיחות הבדיקה
3. פלטפורמת עבודה
(1) הפלטפורמה הראשית יכולה להכיל עד 230 ק"ג ותת הפלטפורמה ל-115 ק"ג.
(2) אורך משטח עבודה × רוחב: 2.27 מ' × 0.81 מ';
(3) תת-פלטפורמה יכולה להתארך בצורה אחת ב-0.9 מ';
(4) שער הבמה ננעל עצמית
(5) מגן פלטפורמה מתקפל
4. מערכת הידראולית
(1) אלמנטים הידראוליים - משאבה הידראולית, שסתום ראשי, מנוע הידראולי ובלם הם מהיצרנים המפורסמים המקומיים (או הבינלאומיים)
(2) המערכת ההידראולית מונעת באמצעות משאבת ההילוכים המונעת על ידי מנוע, כדי להעלות או להוריד את הפלטפורמה ולהפעיל ולנווט את הפלטפורמה.
(3) צילינדר ההרמה מצויד בשסתום הורדת חירום - מוודא שהפלטפורמה יכולה לרדת לנסיגה במהירות קבועה גם בתאונה או בניתוק חשמל.
(4) צילינדר ההרמה מצויד במנעול הידראולי כדי להבטיח את השמירה האמינה של גובה פלטפורמת העבודה לאחר שבירת הצינור ההידראולי.
5. מערכת חשמל
(1) המערכת החשמלית משתמשת בטכנולוגיית בקרת CAN bus. השלדה מצוידת בבקר, הפלטפורמה מצוידת בידית בקרה והתקשורת בין השלדה לבקר הפלטפורמה מתבצעת באמצעות CAN bus כדי לשלוט על פעולת המכונה .
(2) טכנולוגיות הבקרה הפרופורציונליות הופכות כל פעולה ליציבה.
(3) מערכת החשמל שולטת בכל הפעולות, לרבות ההיגוי שמאלה/ימינה, הנסיעה קדימה/אחורה, המעבר בין מהירויות גבוהות לנמוכות והרמה/הורדה של משטח העבודה.
(4) שיטות בטיחות ואזהרה מרובות: מגן הטיה;נעילה הדדית של ידיות;הגנה אוטומטית על בורות;הגנה אוטומטית במהירות נמוכה בגובה רב;הפסקת נפילה למשך שלוש שניות;מערכת התרעה בעומס כבד (אופציונלי);מערכת מגן טעינה;לחצן מצוקה;זמזם פעולה, מהבהב תדרים, צופר, טיימר ומערכת אבחון תקלות.
III.תצורה של אלמנטים עיקריים
| S/N | רכיב מפתח | כַּמוּת | מותג | הערה |
| 1 | בקר | 1 | הירשמן/עמק צפון | |
| 2 | משאבה ראשית | 1 | סנט/בוצ'ר | |
| 3 | מנוע הידראולי | 2 | דנפוס | |
| 4 | בלם הידראולי | 2 | דנפוס | |
| 5 | יחידת כוח | 1 | בוכר/GERI | |
| 6 | צילינדר מטלטלת | 1 | XCMG מחלקה הידראולית / Dacheng / Shengbang / Diaojiang | |
| 7 | צילינדר הגה | 1 | ||
| 8 | סוֹלְלָה | 4 | טרויאני/לאוך | |
| 9 | מַטעֵן | 1 | GPD | |
| 10 | מתג גבול | 2 | Honeywell/CNTD | |
| 11 | מתג בדיקה | 2 | Honeywell/CNTD | |
| 12 | הנעה מנוע | 1 | קרטיס | |
| 13 | צמיג | 4 | Exmile/Topower | |
| 14 | חיישן זווית | 1 | Honeywell | אופציונאלי |
| 15 | חיישן לחץ | 1 | danfoss | אופציונאלי |
IV.טבלה של פרמטרים טכניים עיקריים
| פריט | יחידה | פָּרָמֶטֶר | סובלנות מותרת | |
| גודל המכונה | אורך (ללא סולם) | mm | 2485 (2285) | ±0.5 % |
| רוֹחַב | mm | 810 | ||
| גובה (פלטפורמה מקופלת) | mm | 2345 (1965) | ||
| בסיס גלגלים | mm | 1871 | ±0.5 % | |
| גלגל משאית | mm | 683 | ±0.5 % | |
| מרווח קרקע מינימלי (מגן בור עולה/יורד) | mm | 100/20 | ±5% | |
| מימד פלטפורמת עבודה | אורך | mm | 2276 | ±0.5 % |
| רוֹחַב | mm | 810 | ||
| גוֹבַה | mm | 1254 | ||
| אורך הארכה של פלטפורמת העזר | mm | 900 | ||
| מיקום מרכזי של המכונה | מרחק אופקי לפיר הקדמי | mm | 927 | ±0.5 % |
| גובה המרכז | mm | 475 | ||
| המסה הכוללת של המכונה | kg | 2170 | ±3% | |
| מקסימוםגובה הפלטפורמה | m | 8 | ±1% | |
| מינימוםגובה הפלטפורמה | m | 1.2 | ±1% | |
| גובה עבודה מקסימלי | m | 10 | ±1% | |
| רדיוס סיבוב מינימלי (גלגל פנימי/גלגל חיצוני) | m | 0/2.3 | ±1% | |
| עומס מדורג של פלטפורמת עבודה | kg | 230 | — | |
| מטען לאחר עבודה הורחבה | kg | 115 | — | |
| זמן הרמה של פלטפורמת עבודה | s | 29 ~ 40 | — | |
| הורדת זמן פלטפורמת העבודה | s | 34 ~ 45 | — | |
| מקסימוםמהירות ריצה במצב נמוך. | קמ"ש | ≥3.5 | — | |
| מקסימוםמהירות נסיעה בגובה רב | קמ"ש | ≥0.8 | — | |
| יכולת ציון מקסימלית | % | 25 | — | |
| זווית אזהרת הטיה (צד/קדימה ואחורה) | ° | 1.5/3 | ||
| מנוע הרמה/הפעלה | דֶגֶם | — | — | — |
| כוח מדורג | kW | 3.3 | — | |
| יַצרָן | — | — | — | |
| סוֹלְלָה | דֶגֶם | — | T105/DT106 | — |
| מתח | v | 24 | — | |
| קיבולת | Ah | 225 | — | |
| יַצרָן | — | טרויאני/לאוך | — | |
| דגמי צמיגים | — | חסר עקבות ומוצק /381×127 | — | |
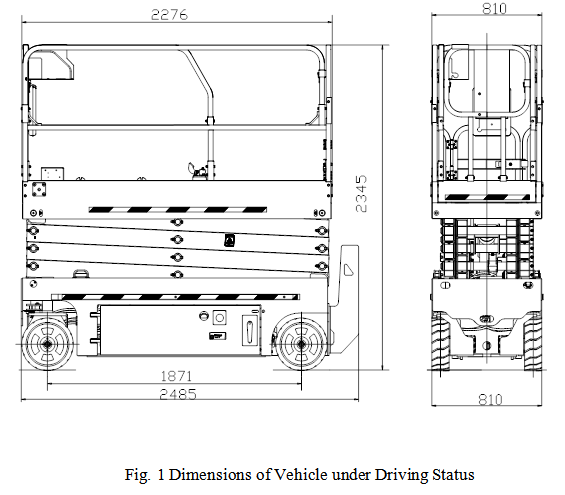
V. תרשים ממדי של רכב במצב ריצה
קובץ מצורף: תצורות אופציונליות
(1) מערכת התרעה על עומס
(2) מנורת עבודה של הבמה
(3) מחובר לצינור האוויר של במת העבודה
(4) מחובר לאספקת החשמל של פלטפורמת העבודה



